📅 19th of November 2025
📍 Jade University of Applied Sciences Wilhelmshaven
In November 2025, we took part in a robotics competition for the first time that did not involve our own soccer robots: the Robot Design Challenge at Jade University of Applied Sciences in Wilhelmshaven!
What is the Robot Design Challenge?
The Robot Design Challenge is an annual technology competition for school pupils, students, and anyone who enjoys robotics. As part of Jade Career Day, teams of two to three people compete against each other to develop a robot that has to complete a set course involving a wide variety of tasks.
All teams start with the same kit, which is sent out a few weeks before the event and contains a wide range of components: motors, sensors, LEDs, circuit boards, a controller, and much more. During this construction phase, the teams tinker, design, test, and optimize. The highlight: the kit, tasks, and course change every year, so new technical and creative solutions are always required.

The competition: What must the robots be able to do?
On the themed course, the robots must complete certain tasks, such as:
- Overcoming obstacles
- Moving, picking up, and transporting objects
- Mastering challenging surfaces, ramps, or tunnels
In addition to this competition, there will also be a presentation of the robot, for which a supplementary poster will be created. In the presentation, the team will demonstrate the robot’s most important functions and explain the ideas behind them.

What was it about this year?
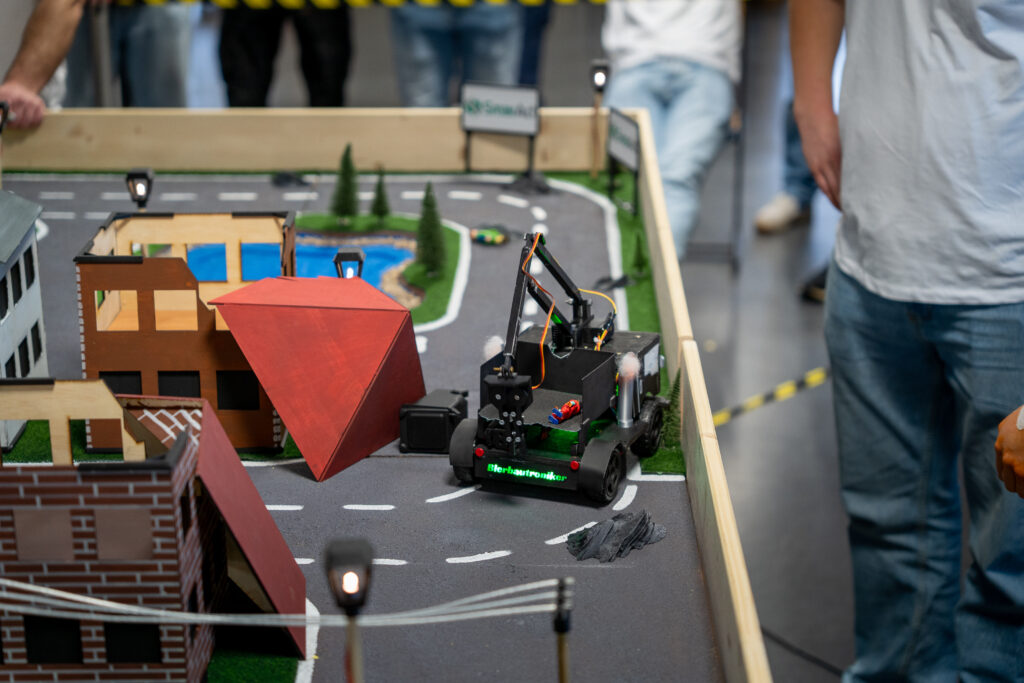
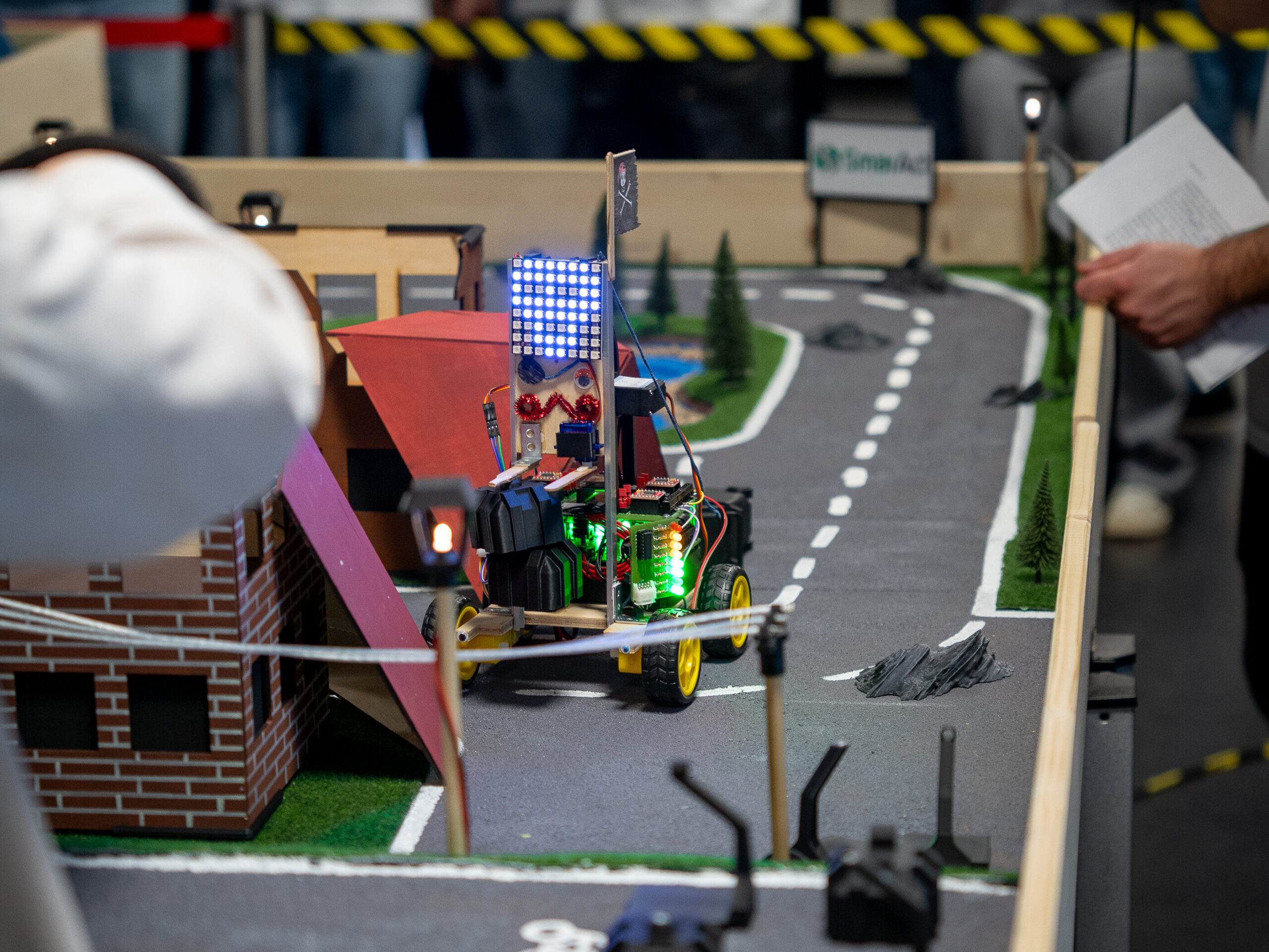
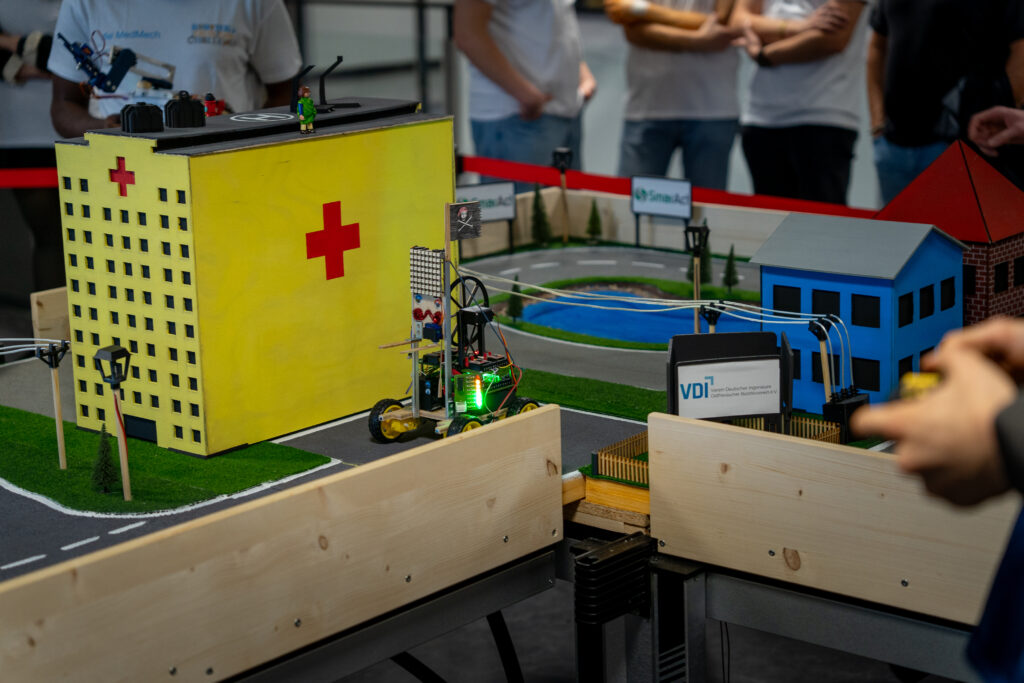
In previous years, scenarios included “fire and ice” and collecting trash in the Wadden Sea, but this year the focus was on cleanup efforts in Wilhelmshaven after a storm: exposing power lines, transporting relief supplies, and bringing people to the central hospital.
What did our robot look like?
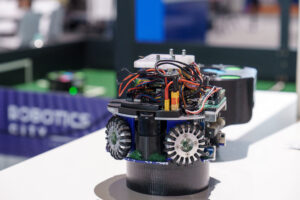
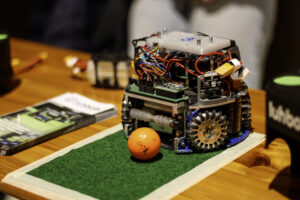
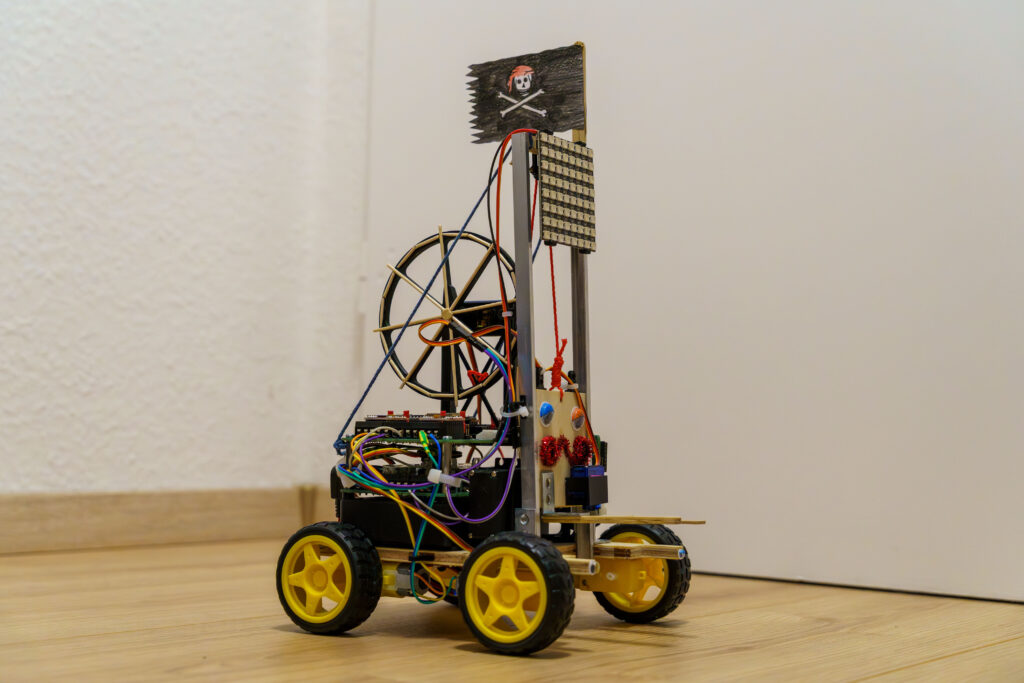
Our pirate ship-inspired robot was named “Sir Lift-A-Lot” and was equipped with five central elements:
- The crane: The two outer guide rails were cut from a square tube, in the middle of which a wooden sled can move up and down linearly. The deflection pulley attached at the top serves to connect the crane to the steering wheel
- The steering wheel: Since the servo motor can only rotate 180°, we needed a way to translate the desired rotational movement into linear movement. To do this, the size of the wheel was chosen so that we could achieve 17 cm of linear movement
- The fork: While the rigid side of the fork is equipped with a magnet to grasp magnetic objects, the flexible side of the fork can move to the right and left to release the grasped objects.
- Sir Lancelot: This feature was installed as an emergency poke to assist in the manipulation of objects.
- The ship control: Thanks to its all-wheel drive, the control can perform well on any terrain. It is similar to a tracked tank control, where different speed levels (including turbo, indicated by the red LED) can be selected.




How did it go?
As the only external team, we did pretty well: in the first round, our robot successfully and fairly quickly removed a roof from a power line to get the power running again. In the next round, we delivered the second-highest amount of relief supplies from two collection points to the central hospital. The final round was all about rescuing people, and we had to decide after triage which people to pick up first and also take to the hospital. Overall, our performance earned us third place, which we are very happy with!





Thank you very much for allowing us, as non-students at Jade University, to participate and take on a completely new challenge! We had a lot of fun not only developing the robot but also on the day of the event.