Our software stack is built on the Robot Operating System (ROS), specifically using the ROS1 Noetic release. ROS provides a range of powerful tools for developing and debugging robotics software, including visualization tools like rviz and rqt.
Our System consists of a hierarchical architecture where different nodes communicate with each other using ROS’s communication layer called tcpros. This communication allows the nodes to exchange information and coordinate their actions. Within this architecture, we have implemented a hierarchical system that extends from the Refereebox Connection to rudimentary operations (RO). The ROs are defined as individual actions that are independent of external factors. To implement these actions, we use ROS action servers, which enable the robot to receive updates on current tasks and cancel them if necessary.
The ROs encompass various navigation and manipulation actions that the system needs to perform. By organizing the system into this hierarchical structure and utilizing ROS’s communication and action server capabilities, we have been able to create a modular and flexible robotics software stack.
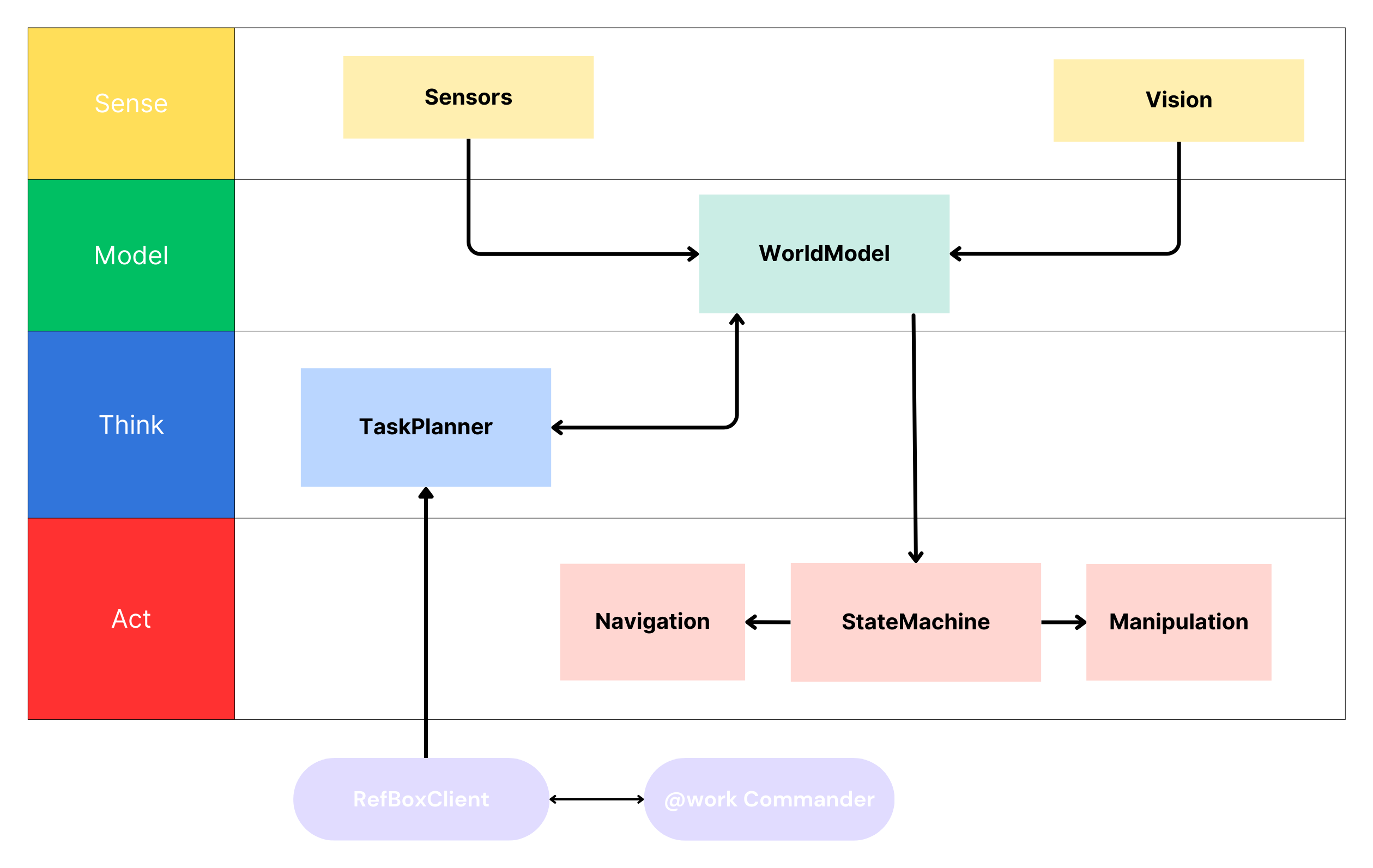
Our software follows a “Sense-Model-Think-Act” model as its fundamental concept. It categorizes all software into one of the four parts, which helps define the possible interactions with other system components.
In the “Sense” part, sensors and nodes gather information from the data, providing details about the environment and the robot’s current state to the WorldModel.
The WorldModel serves as the “Model” by mapping and storing the processed data. Both the “Think” and “Act” parts access the WorldModel to base their decisions on the current internal representation of the environment.
The “Think” part includes the task planner, which converts the information stored in the model and the tasks provided by the RefBoxClient into internal tasks that the robot can execute.
The execution of these tasks is handled by the “Act” system, which is further divided into the “Navigation” and “Manipulation” parts. Navigation focuses on driving the robot around the arena, while Manipulation deals with the robot arm’s interaction with workstations. Both Navigation and Manipulation are triggered by the StateMachine.