Unser Software-Stack basiert auf dem Robot Operating System (ROS), genauer gesagt auf der ROS1 Noetic-Version. ROS bietet eine Vielzahl leistungsstarker Werkzeuge zur Entwicklung und Fehlerbehebung von Robotiksoftware, einschließlich Visualisierungswerkzeugen wie rviz und rqt.
Unser System besteht aus einer hierarchischen Architektur, bei der verschiedene Knoten miteinander über ROS‘ Kommunikationsebene namens tcpros kommunizieren. Diese Kommunikation ermöglicht den Austausch von Informationen und die Koordination der Aktionen zwischen den Knoten.
Innerhalb dieser Architektur haben wir ein hierarchisches System implementiert, das von der Verbindung zum Refreebox bis zu grundlegenden Operationen (RO) reicht. Die ROs sind als einzelne Aktionen definiert, die unabhängig von externen Faktoren sind. Zur Umsetzung dieser Aktionen verwenden wir ROS Action-Server, die es dem Roboter ermöglichen, Updates zu aktuellen Aufgaben zu erhalten und sie bei Bedarf abzubrechen.
Die ROs umfassen verschiedene Navigations- und Manipulationsaktionen, die das System ausführen muss. Durch die Organisation des Systems in diese hierarchische Struktur und die Nutzung der Kommunikations- und Action-Server-Fähigkeiten von ROS haben wir einen modularen und flexiblen Software-Stack für Robotik erstellt.
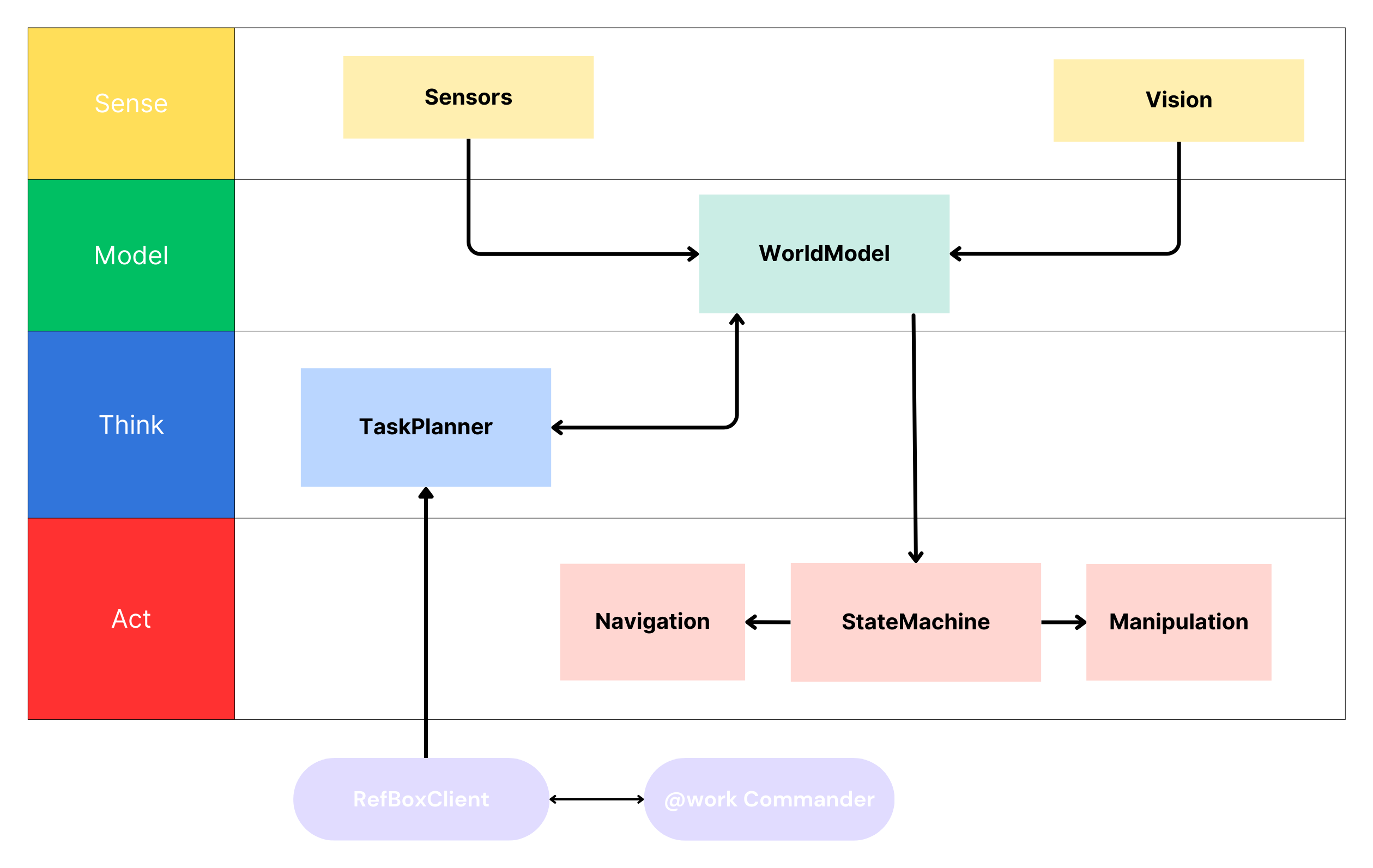
Unsere Software folgt dem Modell „Sense-Model-Think-Act“ als grundlegendes Konzept. Sie kategorisiert die gesamte Software in eine der vier Teile, was dabei hilft, die möglichen Interaktionen mit anderen Systemkomponenten zu definieren.
Im „Sense“-Teil sammeln Sensoren und Knoten Informationen aus den Daten, um Details über die Umgebung und den aktuellen Zustand des Roboters an das WorldModel zu liefern.
Das WorldModel dient als „Model“, indem es die verarbeiteten Daten abbildet und speichert. Sowohl der „Think“-Teil als auch der „Act“-Teil greifen auf das WorldModel zu, um ihre Entscheidungen auf der aktuellen internen Darstellung der Umgebung zu basieren.
Der „Think“-Teil umfasst den Aufgabenplaner, der die im Modell gespeicherten Informationen und die von der RefBoxClient bereitgestellten Aufgaben in interne Aufgaben umwandelt, die der Roboter ausführen kann.
Die Ausführung dieser Aufgaben wird vom „Act“-System übernommen, das weiter in die Teile „Navigation“ und „Manipulation“ unterteilt ist. Die Navigation konzentriert sich auf das Fahren des Roboters in der Arena, während die Manipulation die Interaktion des Roboterarms mit Arbeitsstationen behandelt. Sowohl die Navigation als auch die Manipulation werden durch die StateMachine ausgelöst.