
Autonomous soccer on another level!

What's it about?
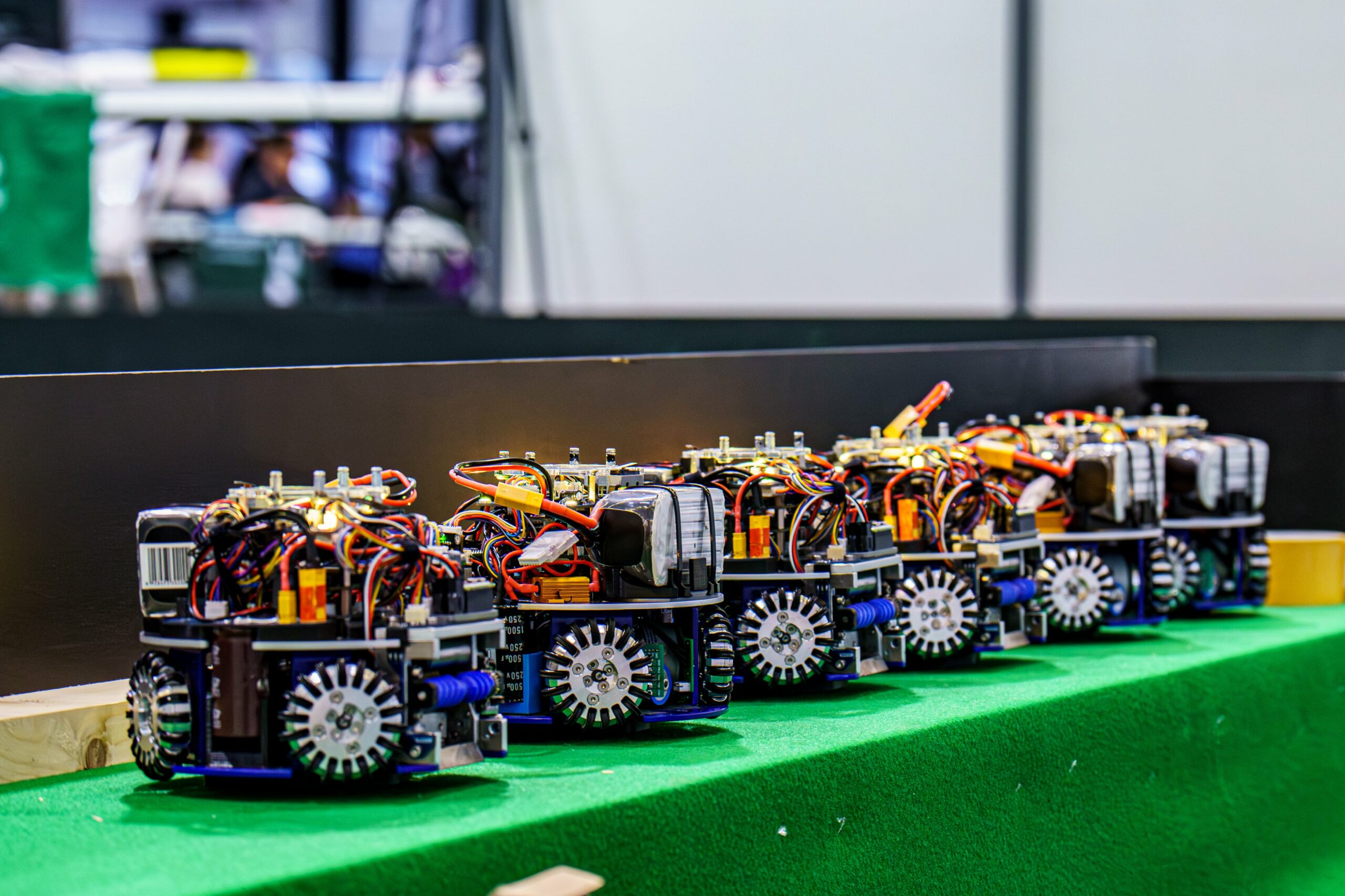
Since 2019, we have been building a fully autonomous robotics team consisting of six identical robots. These robots are designed and programmed to play soccer against other teams. Connected via a server, these robots are supposed to communicate with each other and coordinate complex actions such as passes or goal kicks, as well as defending their own goal. To guide and shoot the ball, the robots are equipped with a dribbling and a shooting device. We have been competing with our robots in the RoboCup, the World Robotics Championship, in the Small Size League since 2022.

The RoboCup
Autonomous Soccer
The RoboCup Soccer Small Size League is about fully autonomous robots playing soccer in a 6 vs. 6 match with a golf ball. The rules are very similar to those of real soccer, only some rules have been adapted.
Motion Tracking
All robots are tracked with multiple cameras above the playing field. Both teams have access to the position and orientation of all robots, including the position of the ball. Nevertheless, the data must be filtered from the global position system.
Cloud-Robotics
Teams can use an external server or workstation to calculate all actions to be performed. This enables better communication between all robots, as all decisions are made centrally on one device.
Our goal is not to build a team as quickly as possible, but to learn as much as we can along the way.
What tasks do we have to accomplish as a team?
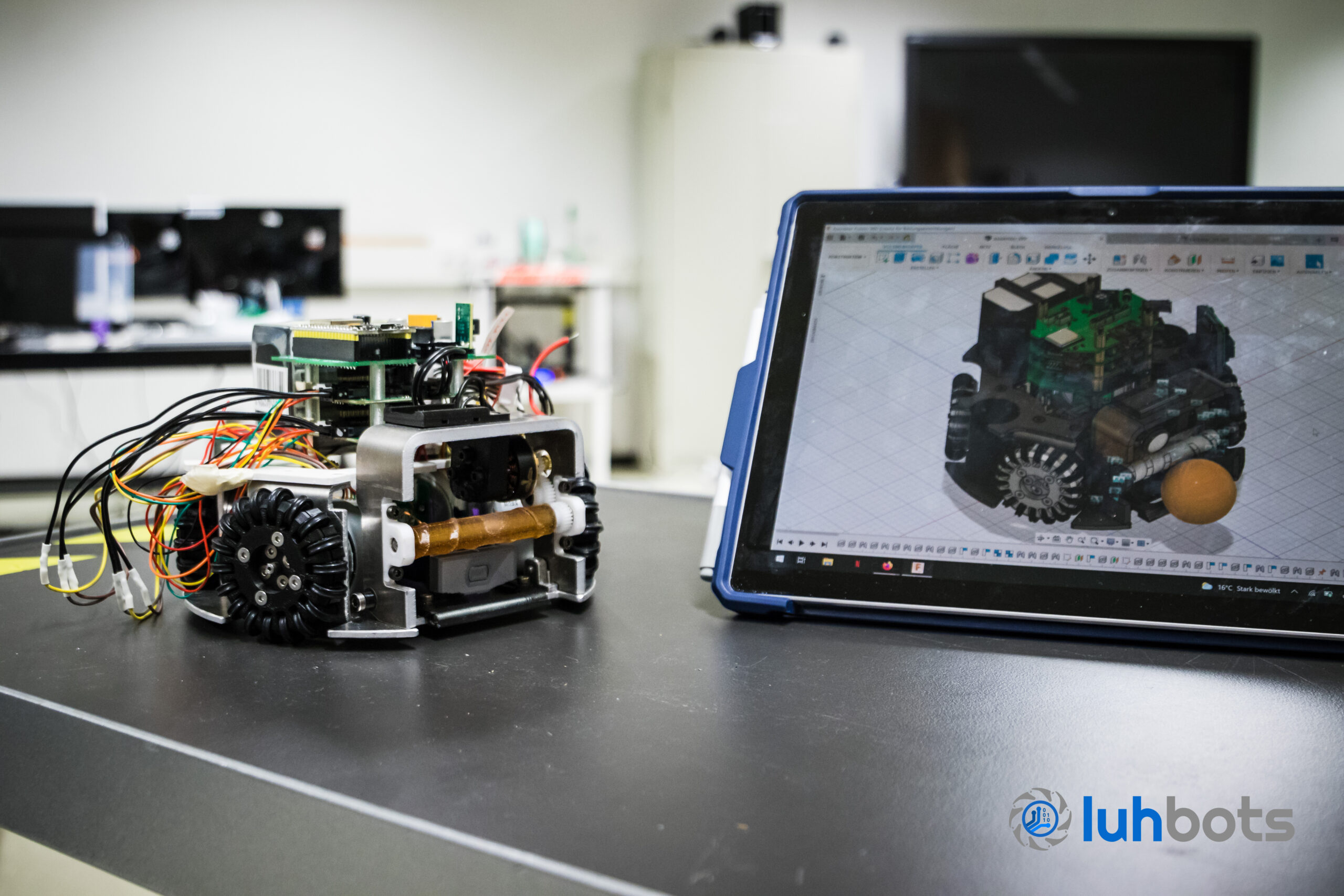
In addition to programming the robot firmware, we also programme the software and strategy running on the server. Furthermore, the entire mechanics and electronics are designed, built and continuously improved by our team.
Our team is divided into five main working groups:
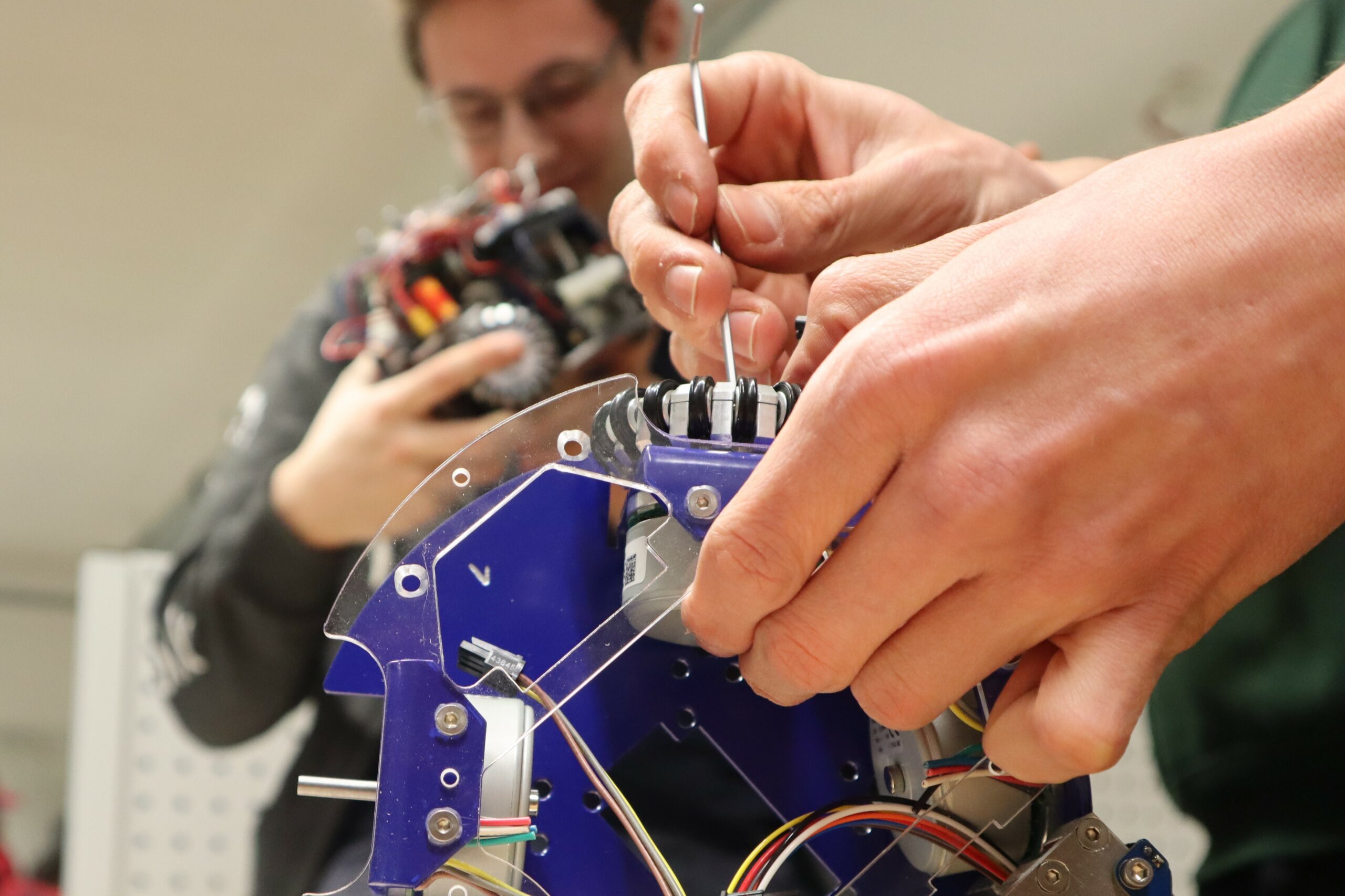
Mechanics
The mechanics deal with all construction-related topics such as design and manufacturing of the robots. The parts for the robots are mostly manufactured with our own CNC machine at the university or printed with one of the various 3D printers.
Electronics
Electronics focuses on the development, design and testing of circuit boards for our robots. Besides simple voltage regulators, the boards mainly consist of power electronics and control for the four BLDC motors as well as some advanced circuitry, including safety measures for the robot's kicker.
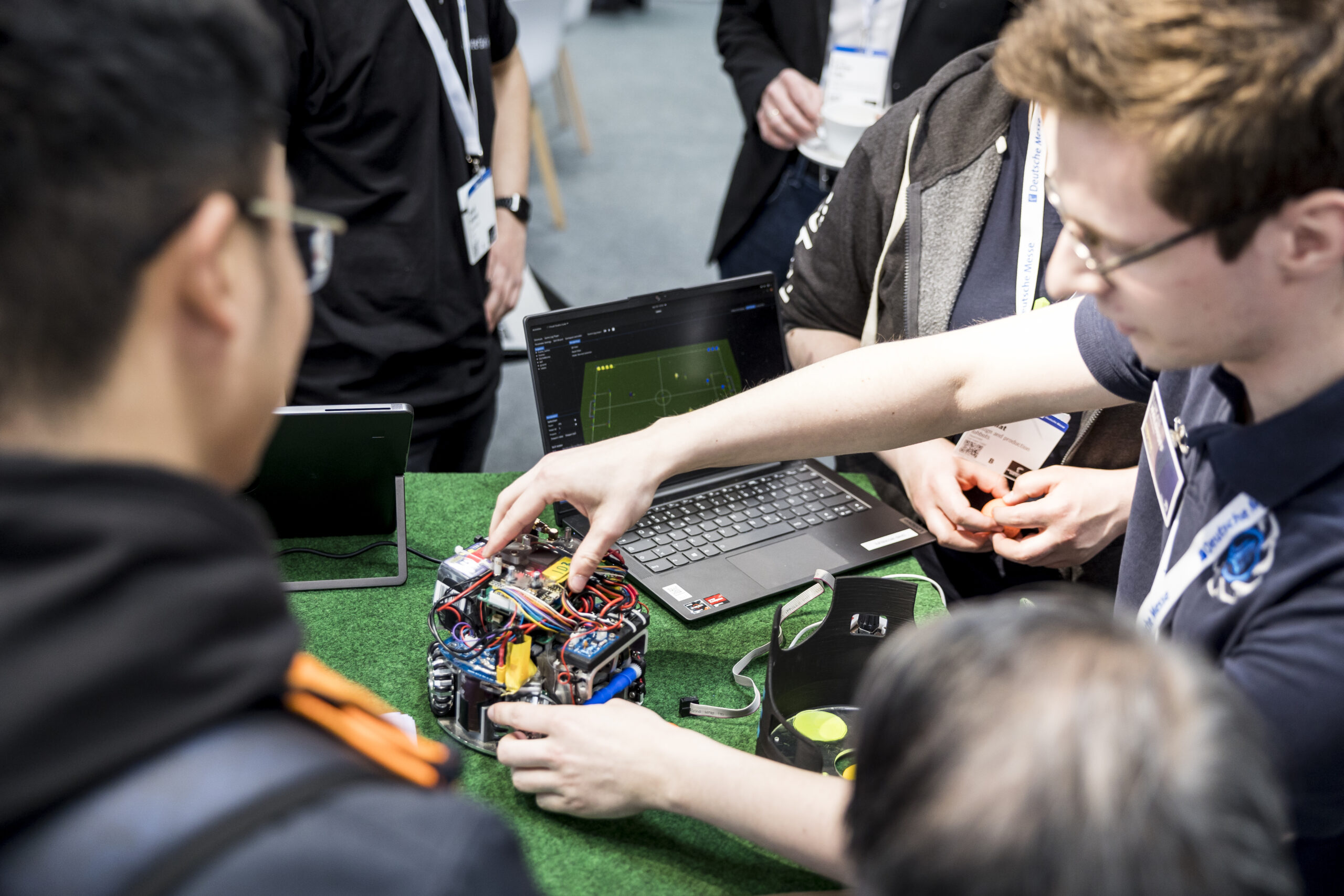
Software
The software develops the software that runs on our robots, as well as the software on our computing server. As the name suggests, most of the calculations are done on the server, while the robots mainly execute commands given by the programs on the server.
Strategy
The strategy puts the artificial intelligence in the game against other teams. It analyzes the current game situation and coordinates the movements and actions of our robots for the best possible success. The strategy adapts to the changing conditions in the game and makes decisions in real time.
Orga & PR
The people in Orga & PR take care of the internal coordination of the team and the external communication with students and companies. From administrative tasks to event planning to creative projects, it's all here. Here we organize, inform and motivate in order to build a productive team dynamic and a strong partner network.
When we meet up:
We meet within the departments every week for a fixed department meeting and at individual working times in our lab. In addition to these department meetings, there is also the big team meeting every Wednesday at 6:30 pm.
Feel free to drop by!
Mechanics
Thursday 6 pm
Working time: Mondays from 3 pm
Electronics
Thursday 7 pm
Working time: Thursdays from 2 pm
Software
Monday 6 pm
Working time: Tuesdays from 5 pm
Strategy
Monday 6 pm
Working time: Tuesdays from 5 pm
Team Meeting
Wednesday 6:30 pm
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}